���C�X�g���������
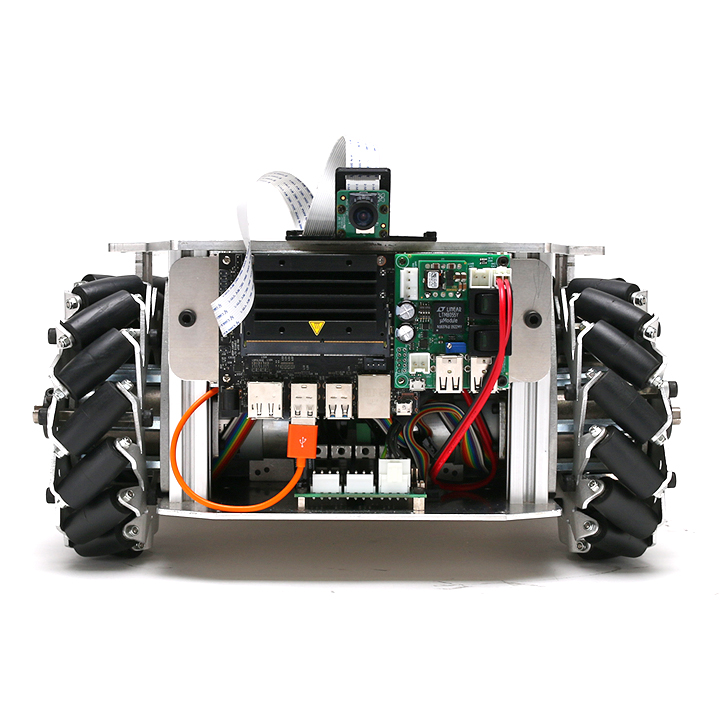
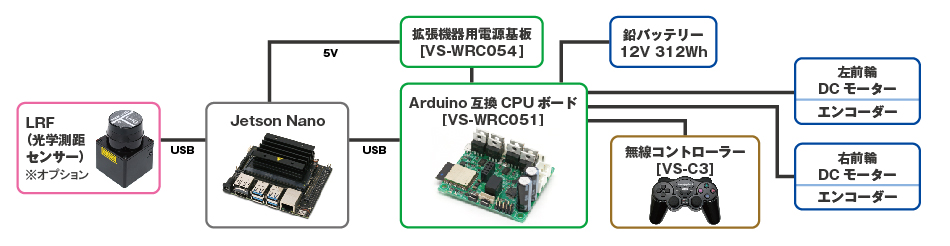
01NVIDIA�А�Jetson Nano�𓋍ڂ�����ԃ��{�b�g����
JetBot�v���W�F�N�g�����p������^��쓮��ԃ��{�b�g�uJetBot Mega�v
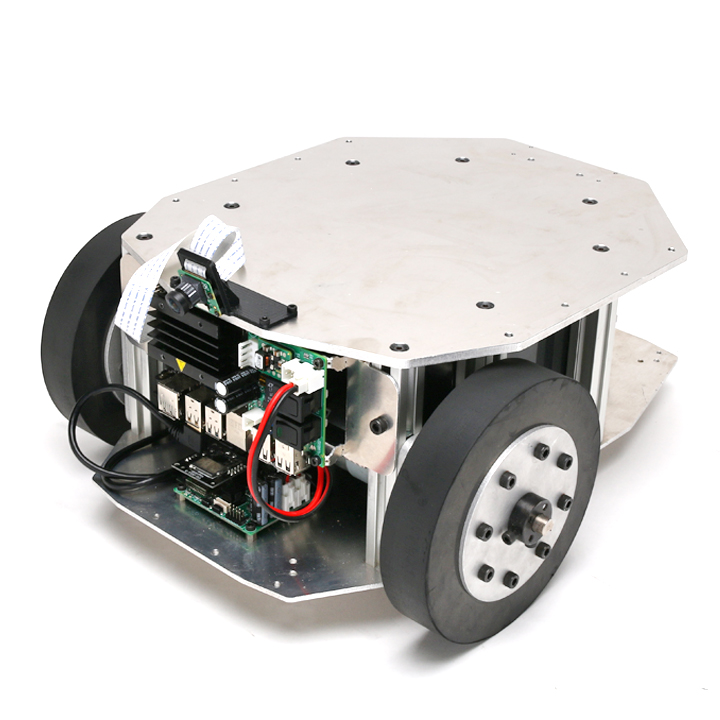
JetBot Mega�́A���d�ʖ�40kg�̌����J���p��ԃ��{�b�g�u���K���[�o�[�v���x�[�X➑̂Ƃ��ANVIDIA�Ђ̒���JetBot�v���W�F�N�g�����p������쓮�̑�ԃ��{�b�g�ł��B ���d��40kg�̃��K���[�o�[��➑̂ƁAJetson Nano���W���[���̋��͂�GPU�����\�͂�g�ݍ��킹�Ďg�p���邱�Ƃ��ł��܂��B �f�B�[�v���[�j���O��p�������̔F���Ȃǂ����Ȃ����x�ȏ����\�͂��AWeb�u���E�U�x�[�X�̊J���E��̓c�[���ł���Jupyter Notebook�Ŋ��p�ł���ȂǁAJetBot�v���W�F�N�g�̐�i�������̂܂܂ɁA��^��ԃ��{�b�g�̑��j�\�́E�����\�������܂����B JetBot Mega�𗘗p���邱�ƂŁAJetBot�v���W�F�N�g��P���Ȋw�т̃c�[���݂̂Ȃ炸�A��̓I�ȗp�r���������������E�J���v���W�F�N�g�ւƃX�e�b�v�A�b�v�����邱�Ƃ��ł��܂��B
 |
 |
 |
 |
���͂�GPU�����p�����v���W�F�N�g��e�ՂɊJ���\
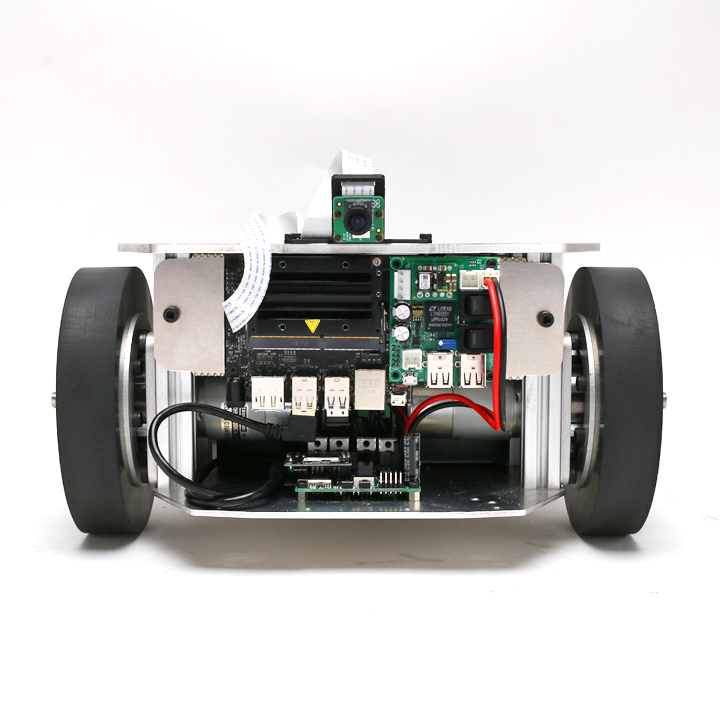
JetBot Mega�ɓ��ڂ���Ă���Jetson Nano�ł́A�ʏ��CPU�ɉ������͂�GPU�����p�\�ł��B NVIDIA�Ђ̒���JetBot�v���W�F�N�g�ł͂��̉��Z�\�͂����A�f�B�[�v���[�j���O��p�������̔F���ȂǁA����I�ȃR���s���[�e�B���O����y�Ɋw�K�A�������邱�Ƃ��ł��܂��BJetBot Mega�ł́AJetBot�v���W�F�N�g�ŗp�����Ă���Web�u���E�U�x�[�X�̃v���O������Jupyter Notebook��A�����̃T���v���\�[�X�Ȃǂ����p�ł��邽�߁A�����郂�_��AI�ƌĂ��悤�ȋZ�p��̊��A��������p�r�ɓK���Ă��܂��B
��쓮�̑�^��ԃ��{�b�g�ŁA���p�����������J���ɑΉ�
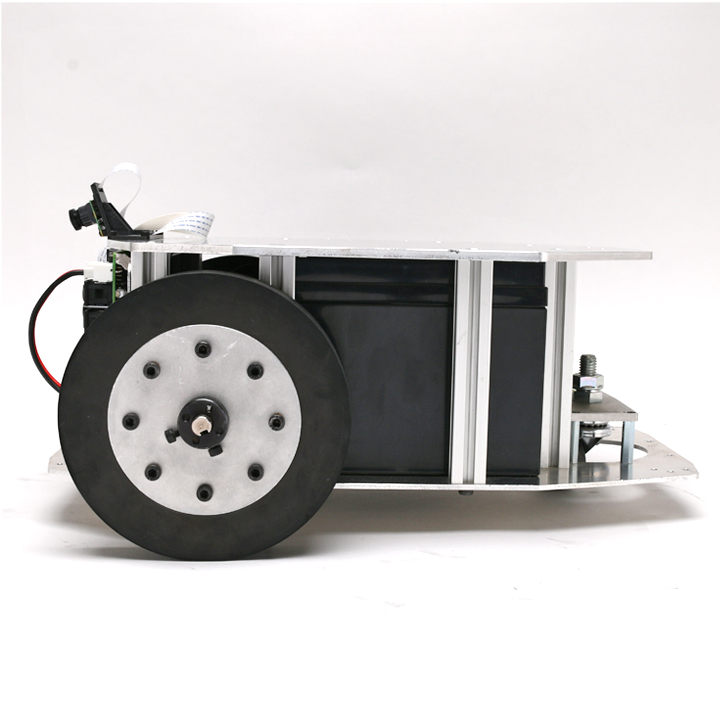
JetBot Mega�ł́A���K���[�o�[�V���[�Y�Ƃ��čD�]�������̎ԑ̂��̗p���܂����B ���d�ʂ͖�40kg�A�ō����x��1.4m/s�ŁAJetBot�v���W�F�N�g�Ƃ��Ă͋ɂ߂đ�^��➑̂ł��邱�Ƃ������ł��B �܂��A��֓Ɨ�����ɂ��A�O�㍶�E�����ɃX���[�Y�Ɉړ��ł���ق��A�Ïl����ϋv���ɂ��D��Ă��܂��B Jetson Nano��GPU�ɂ�鏈�����ʂ����̑�^���{�b�g�ɔ��f�\�Ȃ��߁A�P���ȃv���O���~���O�̊w�K�p�ɂƂǂ܂炸�A���p�����������{�i�I�ȊJ���ɂ��Ή��\�ł��B �܂��A�o�b�e���[�ɂ��ғ����Ԃ͖�30���ԂŁA�K�v�\���ȉp��������Ă��܂��B �܂��A���K���[�o�[�̓����ł���G���R�[�_�[�l�̓ǂݎ��ɂ��Ή����Ă��邽�߁AJetBot�Ƃ��đ��x������s�����Ƃ��\�ł��B ��^���{�b�g�ł��邪�䂦�ɋ��߂����k���Ȑ���ɂ��A�\���ɑΉ��ł��܂��B
���o�b�e���[�쓮���Ԃɂ��ẮA�W���I�Ȋ����ł̐v�l�ł��B���p�̏ɂ���āA�o�b�e���[�쓮���Ԃ͑傫���قȂ�܂��B
��p�̖����R���g���[���[�ŊȒP����
�{���i�ɕt������Q�[���p�b�h�^�����R���g���[���[�uVS-C3�v���g���APC����ڑ����Ȃ��Ă��AJetBot Mega�����c���邱�Ƃ��ł��܂��B �Ȃ��A�{�@�\��Jetson Nano�ł͂Ȃ�������VS-WRC051�ւ̐ڑ��ƂȂ�܂��̂ŁAVS-C3�̐M����Jetson Nano�ŔF���ł�����̂ł͂���܂���B
�@�\���g������I�v�V����
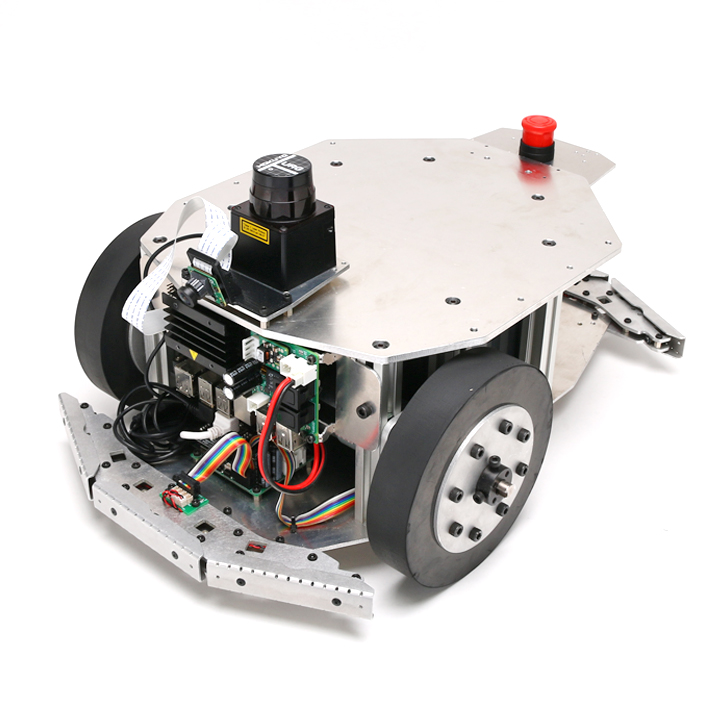
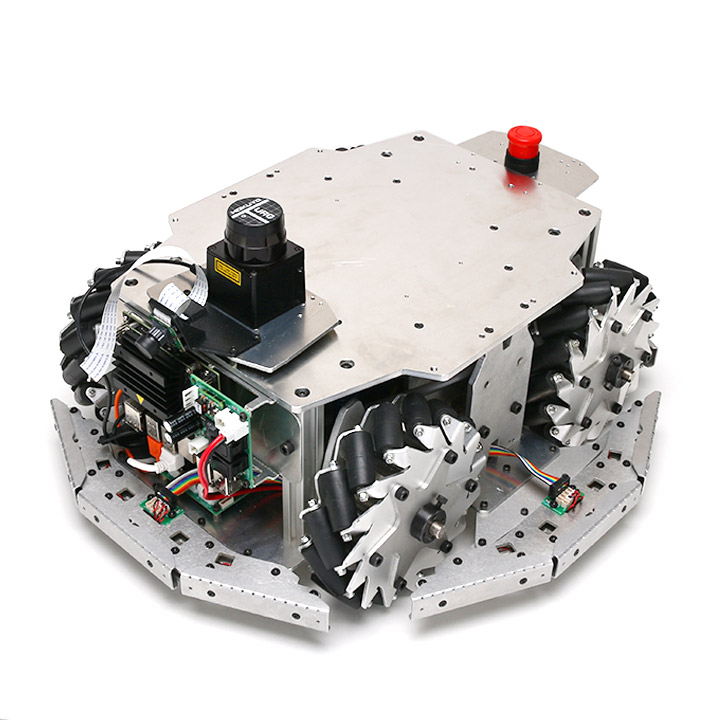
JetBot Mega�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- ���[�U�[�����W�t�@�C���_
�@�̎��͂̏�Q���������m����LRF�����t����A�{�̒������̗L���I�v�V�����ł��B - �O��o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O��Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - ����~�X�C�b�`�I�v�V����
��Ԗ{�̂̌�ɔ���~�X�C�b�`�����t���邱�Ƃ��ł��܂��B - ���C�����X�[�d
�����[�d�̋@�\��lj�����A�{�̎��̗L���I�v�V�����ł��B�{�̌㕔�ւ̎��t���ƂȂ�܂��B
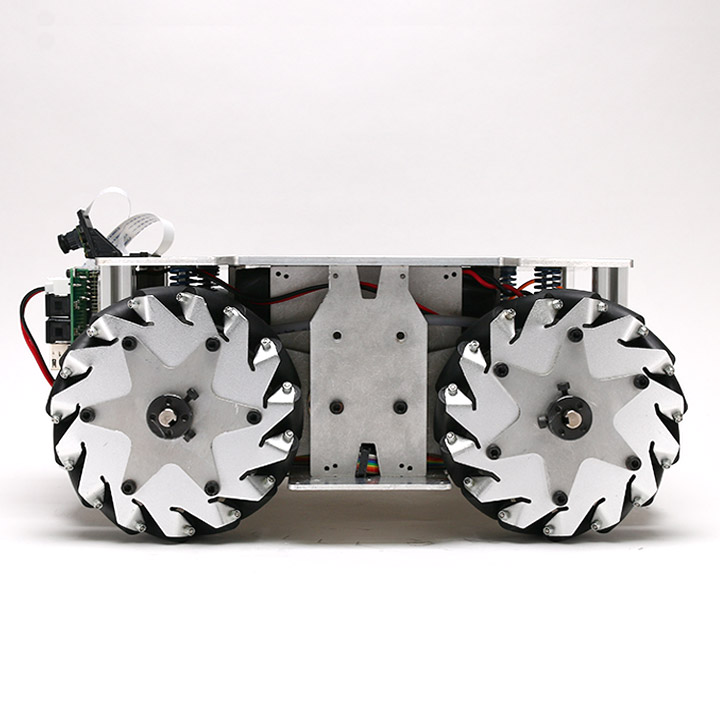
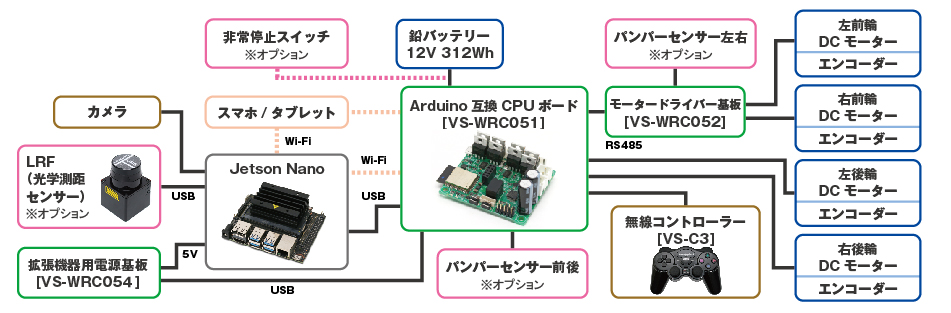
JetBot�v���W�F�N�g�����p������^�l�쓮��ԃ��{�b�g�uJetBot Mecanum�v
JetBot Mecanum�́A���d�ʖ�40kg�̌����J���p��ԃ��{�b�g�u���J�i�����[�o�[�v���x�[�X➑̂Ƃ��ANVIDIA�Ђ̒���JetBot�v���W�F�N�g�����p�����A�l�쓮��ԃ��{�b�g�ł��B
�D�]�������́uJetBot Mega�v�Ɠ��l�ɁANVIDIA�А�Jetson Nano�ɂ�鋭�͂�GPU�����\�͂�p������^��ԃ��{�b�g�̐��䂪�\�ł��B
Jetson Nano�ł̊J���́AWeb�u���E�U�x�[�X�̊J���E��̓c�[���ł���Jupyter Notebook��p���čs�����Ƃ��ł��܂��B
GPU�R���s���[�e�B���O�̊w�K�c�[���Ƃ��āA�܂��A����Ƒ�^��ԃ��{�b�g�̑��s���\�Ƃ�g�ݍ��킹�������E�J���E�������s���x�[�X�@�̂Ƃ��āA���L������Ŋ��p���邱�Ƃ��ł��܂��B
�{���i�ł́A�쓮�ւƂ��Ďl�ւ̃��J�i���z�C�[�����̗p����Ă��܂��B
�O��ړ��E���E����̂ق��ɁA���E�ւ̕��s�ړ����\�Ȃ��߁A���̔F���Ȃǂ�p�����{�̐���Ɠ��ɑ������悭�A�킸���Ȉʒu���߂�^�[�Q�b�g�ւ̐��m�Ȑڋ߂ȂǁA�@�ׂȐ���ɂ��Ή��ł�����̗ǂ��������ł��B
�@�B�w�K��p�������̔F���ȂǁA�܂��܂����W���������錻��̏���Z�p���A�R���s���[�^�[�̒��ŕ���̂ł͂Ȃ��A���p�I�ȑ�^��ԃ��{�b�g�ɑ����ɃA�E�g�v�b�g�ł��邽�߁A���������������v���Ȍ����E�J�����s���c�[���Ƃ��āA���ʓI�Ɋ��p���������܂��B
 |
 |
 |
 |
���͂�GPU�����p�����v���W�F�N�g��e�ՂɊJ���\
JetBot Mecanum�ɓ��ڂ���Ă���Jetson Nano�ł́A�ʏ��CPU�ɉ������͂�GPU�����p�\�ł��B
NVIDIA�Ђ̒���Je��Bot�v���W�F�N�g�ł͂��̉��Z�\�͂����A�f�B�[�v���[�j���O��p�������̔F���ȂǁA����I�ȃR���s���[�e�B���O����y�Ɋw�K�A�������邱�Ƃ��ł��܂��B
JetBot Mecanum�ł́AJe��Bot�v���W�F�N�g�ŗp�����Ă���Web�u���E�U�x�[�X�̃v���O������Jupyter Notebook��A�����̃T���v���\�[�X�Ȃǂ����p�ł��邽�߁A�����郂�_��AI�ƌĂ��Z�p��̊��A��������p�r�ɓK���Ă��܂��B
���J�i���z�C�[�����g�p�������E���s�ړ��̂��߂̃T���v���\�[�X���p�ӂ��Ă��܂��B
�l�쓮�̑�^��ԃ��{�b�g�ŁA���p�����������J���ɑΉ�
JetBot Mecanum�ł́A�D�]�������́u���J�i�����[�o�[�v���x�[�X�ԑ̂Ƃ��č̗p���܂����B
���d�ʂ͖�40kg�A�ō����x��1.3m/s�ŁAJetBot�v���W�F�N�g�Ƃ��Ă͋ɂ߂đ�^��➑̂ł��邱�Ƃ������ł��B
�܂��A�l�փ��J�i���z�C�[���𓋍ڂ��邱�Ƃɂ��A�O��ړ��A���E����A���E���s�ړ����\�ŁA�����ړ���Ԃɋ��߂���A���ʂ��k���Ȑ���ɑΉ����܂��B
Jetson Nano��GPU�ɂ�鏈�����ʂ����̑�^���{�b�g�ɔ��f�\�Ȃ��߁A�P���ȃv���O���~���O�̊w�K�p�ɂƂǂ܂炸�A���p�����������{�i�I�ȊJ���ɂ��Ή��\�ł��B
�܂��A�o�b�e���[�ɂ�閳�����̉ғ����Ԃ͖�21���ԂŁA�K�v�\���ȉp��������Ă��܂��B
���o�b�e���[�쓮���Ԃɂ��ẮA�W���I�Ȋ����ł̐v�l�ł��B���p�̏ɂ���āA�o�b�e���[�쓮���Ԃ͑傫���قȂ�܂��B
��p�̖����R���g���[���[�ŊȒP����
�{���i�ɕt������Q�[���p�b�h�^�����R���g���[���[�uVS-C3�v���g���APC����ڑ����Ȃ��Ă��AJetBot Mecanum�����c���邱�Ƃ��ł��܂��B �Ȃ��A�{�@�\��Jetson Nano�ł͂Ȃ�������VS-WRC051�ւ̐ڑ��ƂȂ�܂��̂ŁAVS-C3�̐M����Jetson Nano�ŔF���ł�����̂ł͂���܂���B
�@�\���g������I�v�V����
JetBot Mega�ɂ͈ȉ��̃I�v�V��������t���邱�Ƃ��\�ł��B
- ���[�U�[�����W�t�@�C���_
�@�̎��͂̏�Q���������m����LRF�����t����A�{�̒������̗L���I�v�V�����ł��B - �O��o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O��Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - �S���̓o���p�[
�Ǔ��Ƃ̏Փ˂����m�ł���o���p�[�Z���T�����{�b�g�̑O�㍶�E�Ɏ��t����A�{�̒������̗L���I�v�V�����ł��B - ����~�X�C�b�`�I�v�V����
��Ԗ{�̂̌�ɔ���~�X�C�b�`�����t���邱�Ƃ��ł��܂��B - ���C�����X�[�d
�����[�d�̋@�\��lj�����A�{�̎��̗L���I�v�V�����ł��B�{�̌㕔�ւ̎��t���ƂȂ�܂��B
02���i�d�l
| ���i�� | JetBot Mega | JetBot Mecanum |
|---|---|---|
| ���i�i�Ŕ��j | 450,000�~ | 600,000�~ |
| �S�� | 396mm | 398mm |
| �S�� | 353mm | 349mm |
| �S�� | 166mm | 166mm |
| �{�̏d�� | ��16kg | ��21kg |
| �ύڏd�� | ��40kg | |
| �{�̍ގ� | �A���~�j�E�� | �@|
| �ō����x�i�����l�j | 1.4m/s | 1.3m/s |
| �o�b�e���[ | 12V�V�[�����@312Wh | |
| �ғ����ԁi�ڈ��j | ��30���� | ��21���� |
| �쓮���� | ��쓮�A�㕔�L���X�^�[ �~1 | �l�쓮���J�i���z�C�[�� �T�X�y���V�������� |
| �^�C�����a | 152mm | |
| ���[�^ | DC���[�^�[�@40W�~2 | DC���[�^�[�@40W�~4 |
| ��]���o | �G���R�[�_�[ | |
| ������ | VS-WRC051 | |
| �t���i | �[�d��A�������c�Z�b�g | |
| �������I�v�V���� | ���[�U�[�����W�t�@�C���_�[ �O��o���p�[ ����~�X�C�b�` ���C�����X�[�d | ���[�U�[�����W�t�@�C���_�[ �O��o���p�[ �S���̓o���p�[ ����~�X�C�b�` ���C�����X�[�d |
| ���w���͂����� | JetBot Mega | JetBot Mecanum |
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��B

�g���p���ނ̓��ڗ�
(�lj��H����)
�J�X�^�}�C�Y�̂��ē�
�����J���p��ԃ��{�b�g�́A�W���@�ł͎d�l�����Ȃ��A�ʓr�@��𓋍ڂ��Č������������Ƃ�������Ɨl�����ɁA���v�]�ɍ��킹���n�[�h�E�F�A�̃J�X�^�}�C�X���\�ł��B�J�X�^�}�C�Y�ɂ������p�A�[���ɂ��Ă͗v�����ƂɈقȂ�܂��̂ŁA�܂��͂��C�y�ɂ����k���������B
���₢���킹�͂�����
���Ȃ��A���q�l�Ǝ��̃V�X�e���Ɋւ���J���E�T�|�[�g�͍s���Ă���܂���B
�J�X�^�}�C�Y����
A�ЁF�ғ����Ԃ����邽�߂Ƀo�b�e���[��
B�ЁF�ύڏd��300�s�p�Ƀn�[�h�E�F�A�̐v
C�ЁF�ʓr�@��𓋍ڂ��邽�߂̎��t������V�ɒlj��H
D�ЁF�ʓr�@��𓋍ڂ���̂��߂̂₮��̐v�A���t��
E�ЁF�I�v�V�����i��LRF�ł͂Ȃ����[�U�[���w�肷��LRF�����t��
F�ЁF��苭�͂ȃ��[�^�[�ւ̕ύX
�V�Ɋւ��āA�W���̌��ȊO�ɂ�������K�v�ȏꏊ�������X�y�[�X�ł���A�lj��Ńl�W���Ȃǂ̉��H��
�\�ł��B
���̑��̉��H�`��ɂ��܂��ẮA�ʓr�����k���������B
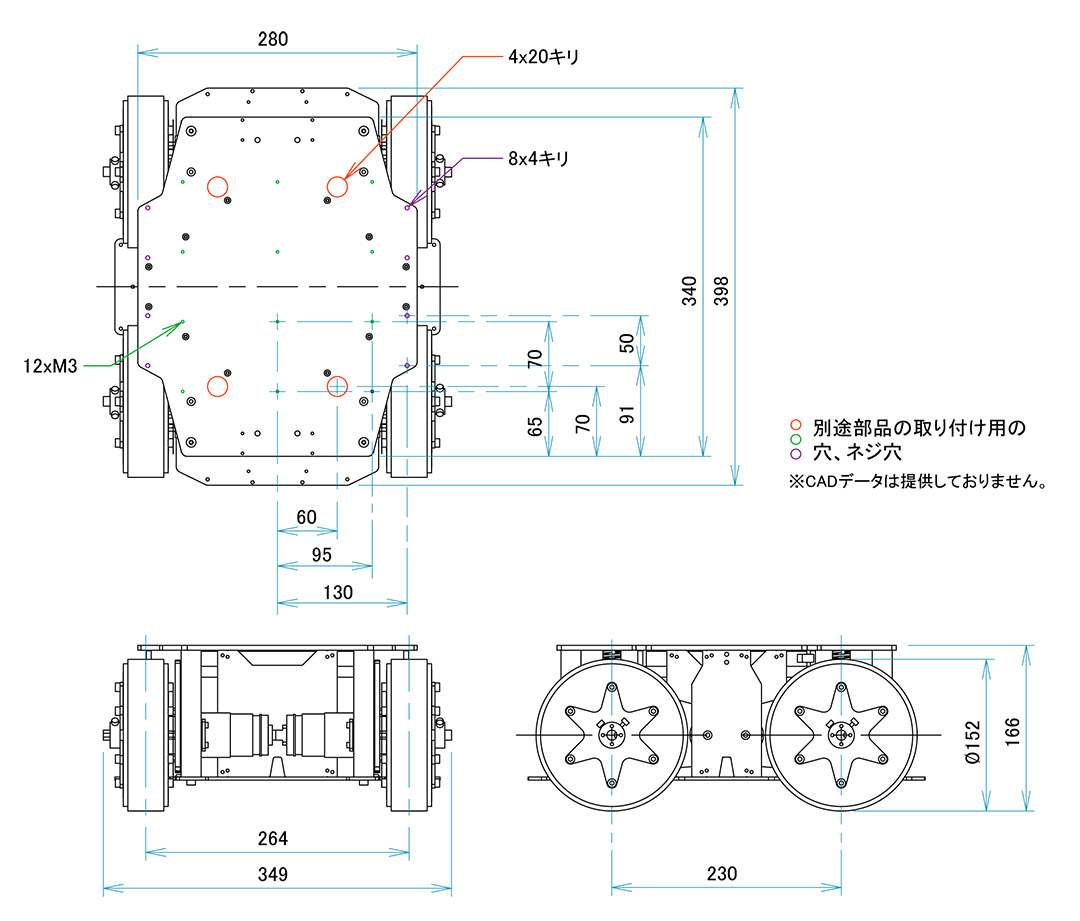
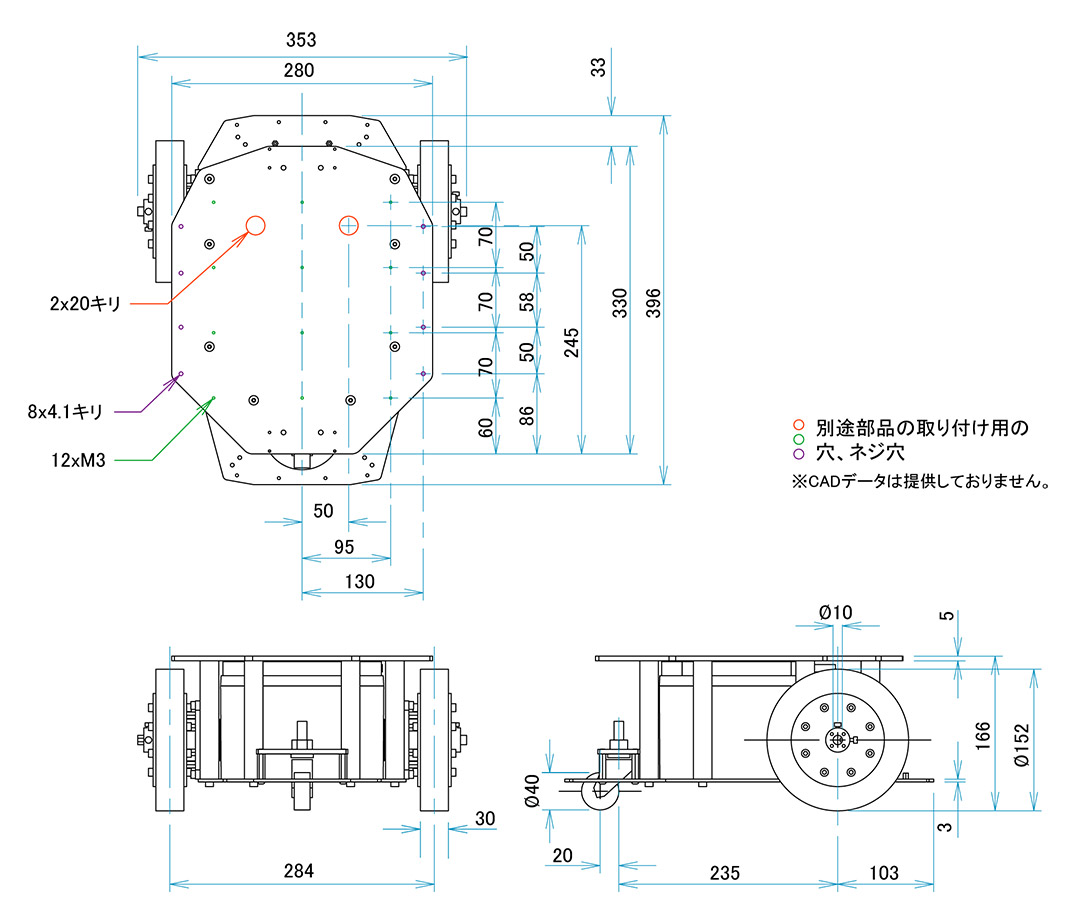
03�n�[�h�E�F�A�\��
JetBot Mega
JetBot Mecanum
�����i�̎d�l�͗\�������ύX����ꍇ���������܂��̂ł�������������
04�L���T�|�[�g�̂��ē�
�����J���p��ԃ��{�b�g�ɂ��āA���[���ł̃T�|�[�g�Ή��ł͂Ȃ��A Web�~�[�e�B���O�ł̂��ł����킹�ɂ��T�|�[�g��������܂��B ���i��30��������̒P���ƂȂ��Ă���܂��̂ŁA1���Ԃ�����]�̏ꍇ�ɂ�2���̂����������肢�������܂��B
���i�F30�� 1���~�i�ŕʁj
�y�ڍׁE���\�����݂͂�����z
Arduino�́AArduino AG�̓o�^���W�ł��B
NVIDIA�ANVIDIA �̃��S�AJetson�́A�č��܂��͑�����NVIDIA Corporation�̏��W�܂��͓o�^���W�ł��B
���̑��A�L�ڂ���Ă��鐻�i���Ȃǂ̌ŗL�����́A��ʂɊe�Ђ̏��W�܂��͓o�^���W�ł��B
