ヴイストン株式会社
01静音性が向上した ROS対応 4WDSローバーX40A

4WDSローバーX40Aは、四輪それぞれに独立したステアリング軸を搭載し、通常の車輪でありながら全方位への移動を実現した研究開発用台車ロボットです。「メガローバーVer.3.0」に代表される弊社製のROS対応研究開発用台車ロボットのラインナップ中でも、特に静粛性と制御性に優れており、「動作音を極限まで低減しつつ、高い位置決め精度を得たい」など、高度なサービスロボットや特殊環境での搬送ロボットの研究・開発用途に適しています。
従来モデルである「4WDSローバーVer2.1」と比較し、動作音がさらに低減されたほか、移動速度が向上しています。同時に、可搬重量は変わらず約40kgを実現しており、研究開発用台車ロボットとして必要十分な耐荷重性能が得られます。
ROSによる制御に対応
本製品はROS 1およびROS 2メッセージ通信に対応しており、ROSが動作するデバイスとWi-FiまたはUSBケーブルで接続することで、rosserialもしくはmicro-ROSを用いたROSのメッセージ通信が可能です。
サンプルファームウェアでは、geometry_msgs/Twist型もしくはgeometry_msgs/msg/Twist型を使って、ROSから台車ロボットに対して移動速度指令値を送信したり、台車ロボットから現在速度やバッテリー電圧を取得したりすることが可能です。また、ユーザーの手によってファームウェアを変更することで、上記の他にも任意のメッセージを送受信することが可能です。
なお、ROSを動作させるデバイスは別途ご用意いただく必要があります。弊社で推奨するデバイスの動作環境は次の通りです(本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります)。
※本製品に含まれないライブラリーなどのセットアップが追加で必要になる場合があります。
【ROS 2使用時の推奨動作環境】
| OS | Ubuntu 22.04 |
| ROS | ROS 2 Humble |
| CPU | IntelR CoreTM Ultra 5 125H Processor |
| RAM | 32GB |
| ストレージ | M.2 SSD 256GB |
| グラフィック | IntelR ArcTM GPU |
※上記条件を満たしていても、相性などにより、正常に動作しない場合があります。
※仮想環境は、タイムラグにより安全な制御が行えない場合があり、推奨しておりません。
ROS 2で使用可能なサンプルパッケージを提供
ROS 2環境で使用可能なサンプルパッケージは、主に以下のものを提供しています。
なお、機材の設定状況や動作環境によっては、サンプルが意図通り動作しない場合があります。その場合、個別環境に合わせた設定などが必要ですが、パラメーターの調整はユーザー独自の開発にあたり、弊社からのサポートの対象外です。
【主なサンプルパッケージ一覧】
- キーボードからの操作
- マウスからの操作
- 走行速度情報をオドメトリに変換
- 変換したオドメトリを機体のモデルファイルと共にrviz2に表示
- SLAMによる地図作成(SLAM Toolbox使用)
- SLAMによる地図作成(gmapping使用)
- 経路計画、追従および障害物回避を行う自律移動(Nav2使用)
全ての駆動輪に独立したステアリングを搭載(4WDS構造)
4WDSローバーX40Aでは、搭載する四つの駆動輪全てに独立して制御できるステアリング機構を備えています。それぞれの駆動輪の角度や回転速度を適切に制御することで、台車ロボットの向きを変更しないまま前後・左右方向への移動が可能なほか、車輪を横滑りさせることなく超信地旋回(その場旋回)することもできます。また、各車輪にはサスペンション機構を備えており、四輪が正しく路面に接地することで、直進性や制御の正確性が得られます。
オムニホイールやメカナムホイールなど、他の全方向移動用車輪と比較し、車輪そのものがシンプルな構造をしているため、汚れやホコリに強いという点も特徴です。
※本製品は屋内専用です。屋外での使用は想定しておりません。
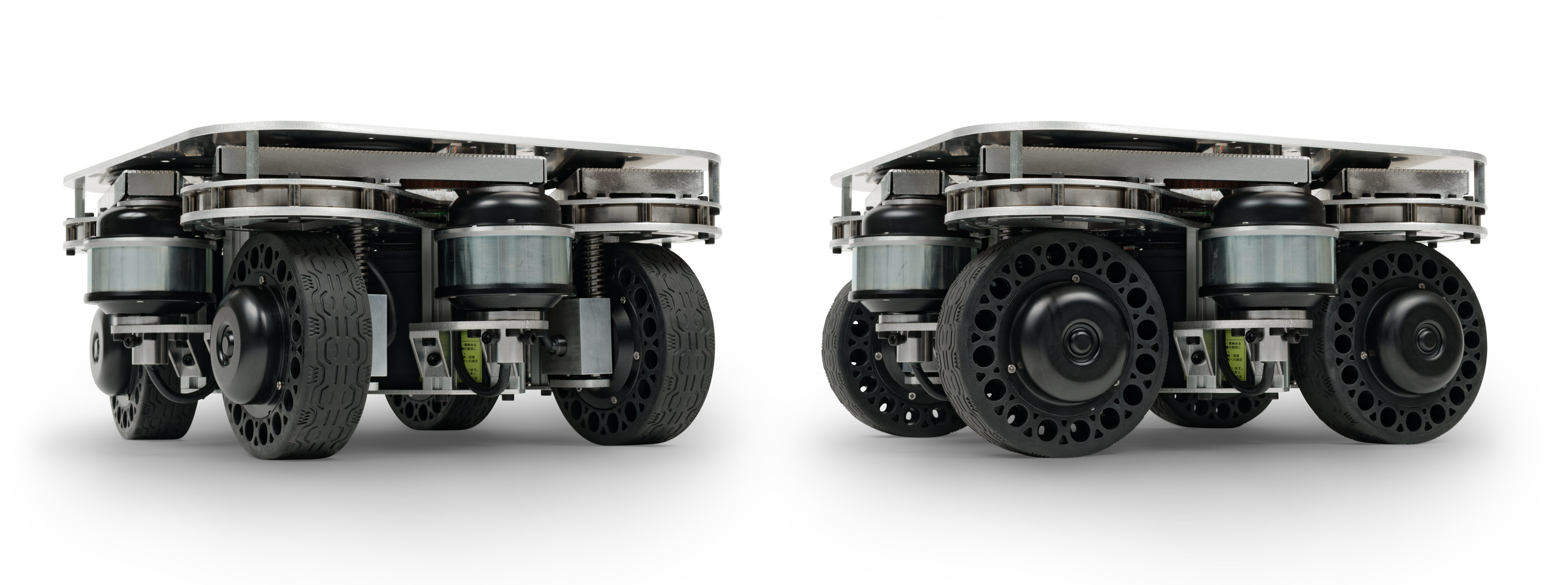
全ての駆動輪に独立したステアリングを搭載
ダイレクトドライブモーターを採用し、さらなる静音化を実現
昨今の自律制御台車ロボットは、その用途において音声認識や音声発話などのヒューマンインタラクションが必要となる場面も多く、台車ロボットそのものが静粛に動作することが強く求められています。
本製品では、車輪の駆動にダイレクトドライブ方式のモーターを採用することにより、旧製品である「4WDSローバーVer2.1」よりもさらに動作音を低減しています。通常車輪を用いる4WDS構造の利点と相まって、理想的な静音台車を実現しています。
複雑な制御を容易に実装可能
四輪独立ステアリング機構で正確な移動を実現するためには、各車輪の角度と速度を適切に制御する必要があります。本製品にはあらかじめ四輪独立ステアリング機構の制御システムが組み込まれているため、ユーザーは並進移動速度と旋回速度を指定するだけで、本製品を自由に走行させることが可能です。移動機構を利用したソリューション全体の開発期間を短縮できるとともに、成果物の価値を向上させることに注力できます。
可搬重量約40kgを実現
4WDSローバーX40Aは、従来モデルからのさらなる静音化を実現しつつ、可搬重量約40kgを実現しています。様々なセンサーやデバイスを搭載するシステムであっても余裕をもって対応でき、研究・開発プロジェクトの自由度を向上させます。

可搬重量約40kgを実現
※本製品は乗用を意図して設計されたものではありません。
有線 / 無線接続による制御が可能
4WDSローバーX40Aは、Wi-Fiによる無線通信と有線のUSBシリアル通信に対応しています。指定のコマンドを用いることで、PCやタブレットなど、様々なデバイスから制御することが可能です。
また、ゲームパッド型無線コントローラーが付属するため、PC等を接続しなくても本体を無線操縦することができます。アナログスティックを使用して、前後へ移動、回転させることもでき、動作確認のための手動操縦、非常時の操作手段等としてお使いいただけます。
Arduino IDEでプログラム可能
本製品に搭載されている制御ボード「VS-WRC058」には、ESP32-WROOM-32マイコンが搭載されており、Arduino IDEを用いて制御プログラムを作成することができます。サンプルコードはArduinoライブラリーの形で製品に付属し提供されますので、ユーザー自身の手でファームウェアのカスタマイズを実施することも可能です。
※VS-WRC058をArduino IDEを用いてプログラミングする場合、Arduino IDE 1.8.13以上が動作する環境が必要です。
拡張しやすいアルミフレームを採用
本製品の本体フレームはアルミ部材にて構成されています。十分な強度を持つと同時に加工が容易なので、ユーザー自身の手で、様々な拡張を容易に行うことができます。上部天板に取り付け穴を開けて部品を追加すること等も可能で、研究・開発の推進に欠かせない自由な拡張性をもたらします。
非常停止スイッチを標準搭載し、取り付け位置が変更可能
4WDSローバーX40Aには非常停止スイッチが標準搭載されています。標準状態では本体から張り出したフレームに固定されているため、運用中のスイッチの押下をスムーズに行えます。また、台車ロボットの四辺いずれの場所にも移動させられるほか、用途によっては天板の中央に移動させることも可能です。
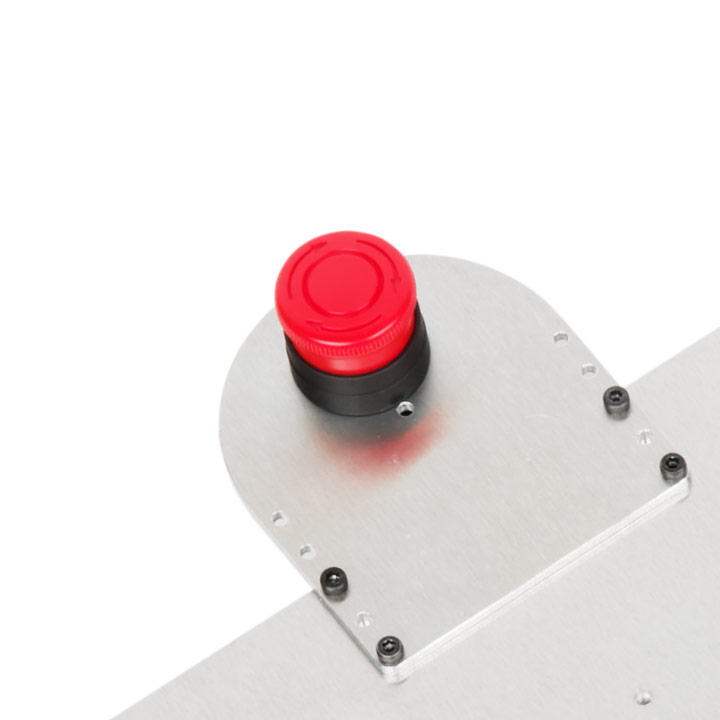
非常停止スイッチを標準搭載
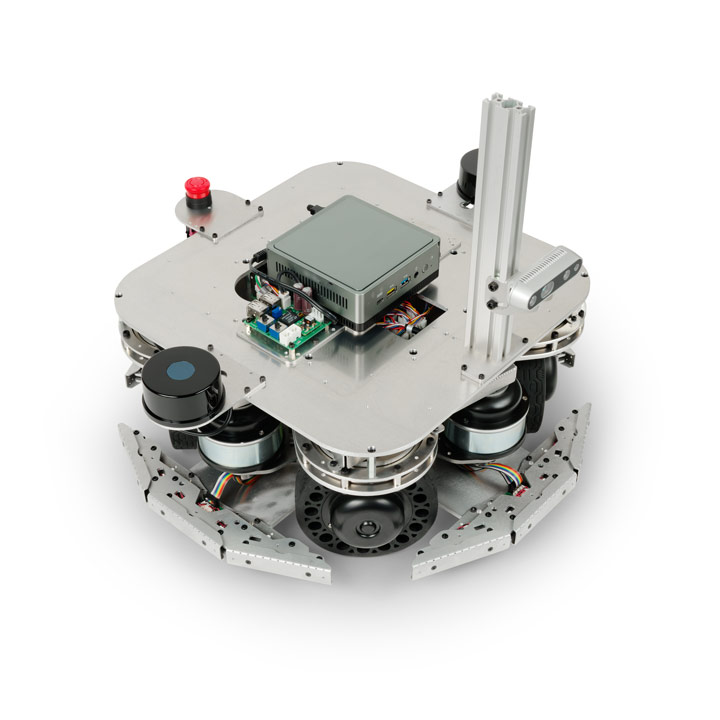
多彩なオプション品に対応
4WDSローバーX40Aは、旧製品と同様に数多くのオプション品に対応しています。用途に合わせたセンサーや構成部品を追加することが可能で、多様な研究・開発分野にて、大型の研究開発用台車ロボットの可搬性や走行能力を存分に活用することができます。

拡張機器搭載例1
(バンパーオプション(全周囲)、LRFオプションTG30(前・後)、拡張機器用電源基板オプションVS-WRC054、ROS PCオプションを搭載)
拡張機器搭載例2
(バンパーオプション(全周囲)、LRFオプションTG30(右・左)、デプスカメラオプション、拡張機器用電源基板オプションVS-WRC054、ROS PCオプションを搭載)
02製品仕様
| 製品名 | 4WDSローバーX40A |
|---|---|
| サイズ | W430×D430×H194(mm) ※車高はサスペンションにより変化 |
| 本体重量 | 約28.4kg |
| 最高速度(実測値) | 1.6m/s |
| 積載重量 | 約40kg |
| 本体材質 | アルミニウム |
| バッテリー | 24Vシール鉛バッテリー 288Wh |
| 駆動方式 | 四輪駆動、独立ステアリング |
| タイヤ直径 | 140mm |
| モーター | BLDCモーター 40W×8 |
| 制御基板 | VS-WRC058 |
| ROS対応 | ROS 1およびROS 2に対応 |
| SDK | VS-WRC058用 Arduinoライブラリー、ROSパッケージ |
| 収録サンプル |
[Arduinoライブラリ] ・車輪制御 ・各種通信機能等 [ROS用サンプルコード] ・ゲームパッドからの操作 ・マウス(タッチパッド)からの操作 ・SLAM(gmapping) ・SLAM(cartographer) ・navigation ※本製品に含まれないライブラリなどのセットアップが追加で必要になる場合があります。 |
| インターフェース | USBシリアル、Wi-Fi(IEEE802.11b/11g/11n) Bluetooth(Bluetooth Classic、BLE 4.2) |
| 付属品 | 充電器、無線操縦用ゲームパッド型コントローラー |
| ご購入はこちら | 4WDSローバーX40A |
※本製品は屋内専用です。屋外での使用は想定しておりません。
また、製品の仕様は予告なく変更となる場合があります。
03ハードウェア構成
4WDSローバーX40A
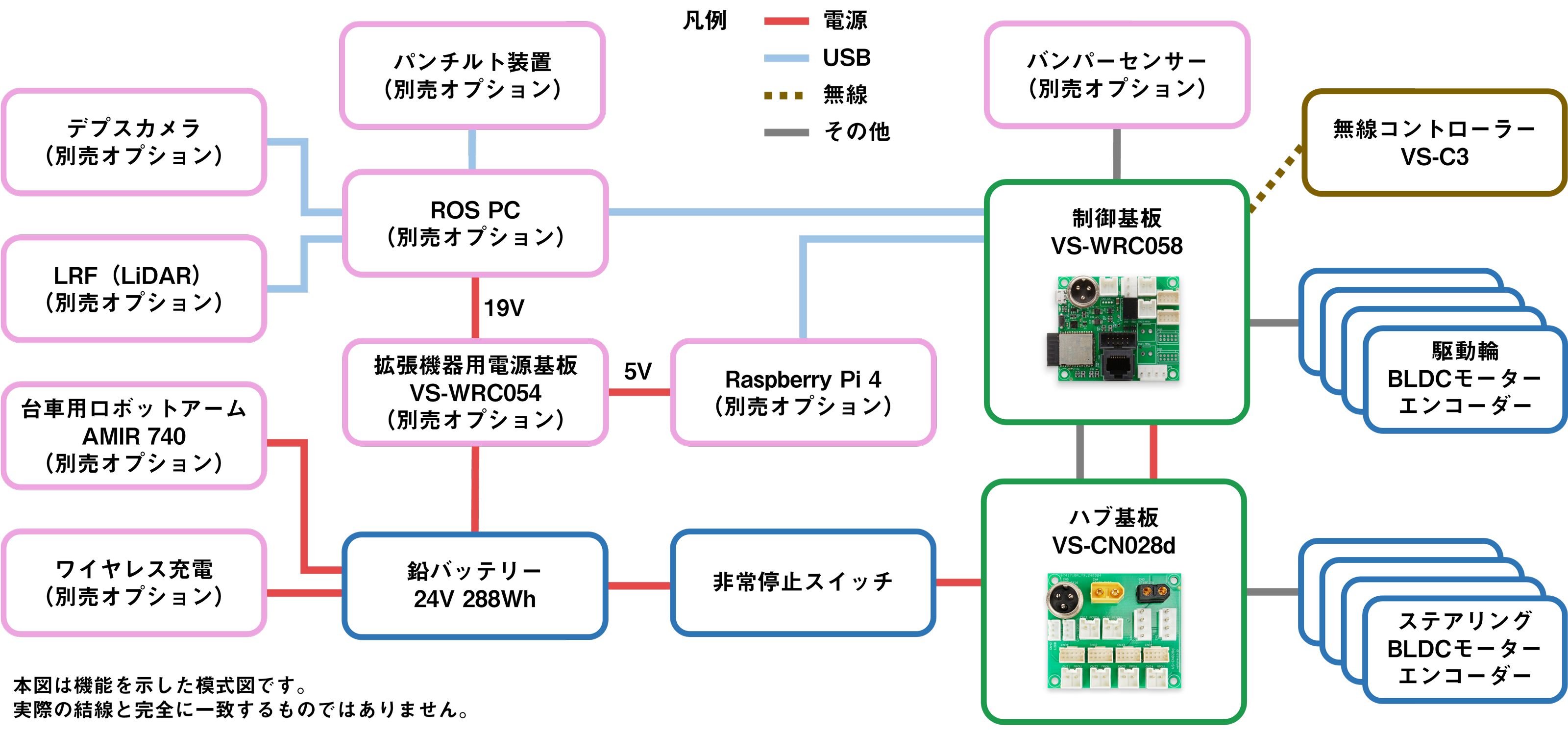
※VS-WRC058には、複数のホストと同時に通信する機能はありません。
※LRF(LiDAR)とデプスカメラは、Raspberry Pi 4に接続することも可能です。
Arduinoは、Arduino AGの登録商標です。
Intel、Intel Core、Intel Arcは、Intel Corporation またはその子会社の登録商標または商標です。
UbuntuはCanonical Ltd.の商標または登録商標です。
BluetoothRは、Bluetooth SIG, Inc. USAの登録商標または商標です。
Raspberry PiはRaspberry Pi財団の登録商標または商標です。
Nav2は、Open Navigation LLCによるオープンソースのプロジェクトです。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
Wi-Fiは、Wi-Fi Allianceの登録商標です。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。
